NE555を用いた傾斜センサーの設計
投稿日: 2025年03月10日
最終更新日: 2025年03月10日
問題: NE555という一般的に使用されているタイマーICチップについて理解を深めたい。また、購入したエレクトロニクスのスターターキットに含まれている傾斜スイッチ(SW-520D)も試してみたい。
解決策: NE555と傾斜スイッチを使用した簡単な傾斜センサーを作り、NE555や回路設計についての知識を深める。
結果: NE555は、双安定モード(バイステーブル)、単安定モード(モノステーブル)、無安定モード(アステーブル)の3つの動作モードを持つチップである。双安定モードではフリップフロップ、単安定モードではパルス発生器、無安定モードでは発振回路として動作させることができる。 今回のプロジェクトでは、双安定モードを使う。図1は、NE555ピンの配置を示す。
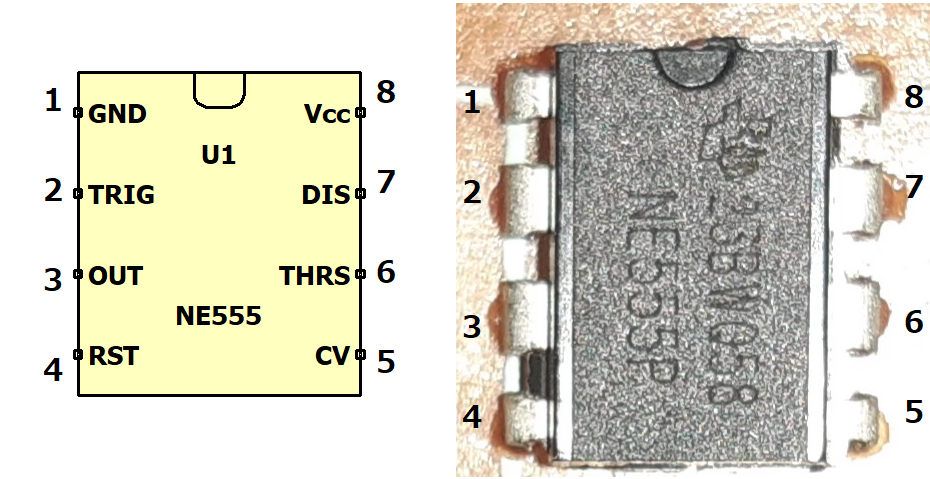
1(GND):グラウンドピン。
2(TRIG):トリガー(Trigger)ピン。LOW(Vccの1/3)になると、3番目の出力ピンをHIGHにさせる。
3(OUT):出力(Output)ピン。おおよそVcc-1.5 [V]の電圧を出力する。出力電流は100~200[mA]程度である。
4(RST):リーセット(Reset)ピン。LOWになると、回路をリーセットする。通常はHIGHになる必要がある。
5(CVまたはCTRL):コントローラ(Control)ピン。シュレスホールドピンの電圧を制御(コントロール)する。ノイズ対策のため、グランドに接続した0.01[μF] のコンデンサと接続することが多い。
6(THRS):シュレスホールド(閾値)ピン。Vccの2/3になると、出力をLOWにする。
7(DISまたはDISCH):ディスチャージピン。出力が HIGH のときはフロート(オープン)、LOW のときはグラウンドと接続される。
8(Vcc):正電源ピン(4.5~15[V])。
今回設計した回路は、図2、3に示す。I1は電子ブザーで、SW1は傾斜スイッチである。電源は2個の3[V]ボタン型電池(CR2032)は理想だが、それ以外の電池も使ってよい。 ただし、電子ブザーがどのくらいの電圧を必要とするのかを確認し、それに基づいて電池を選ぶことが重要である(電池の電圧の6割程度しかブザーに出力されない)。.png)
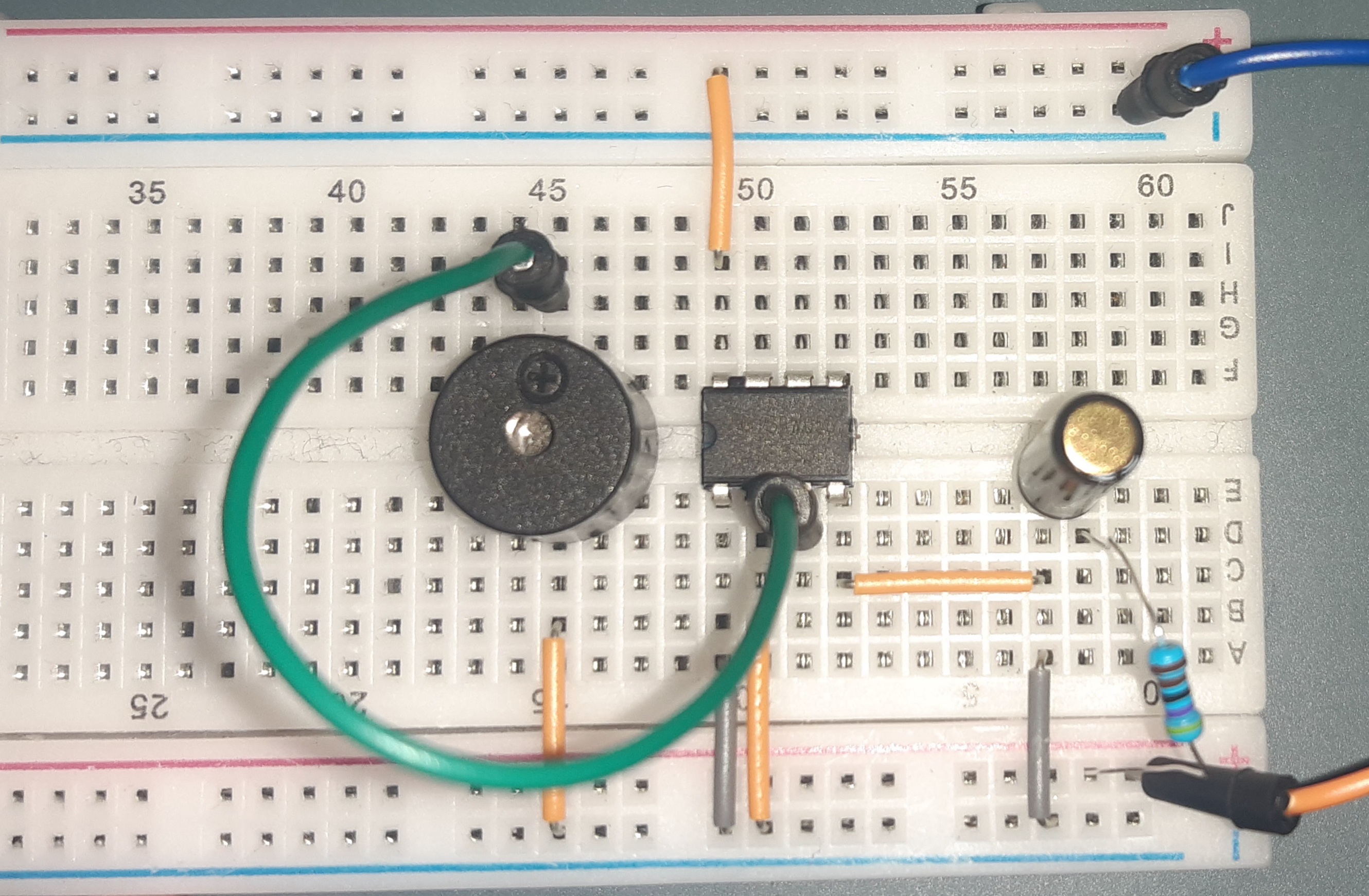
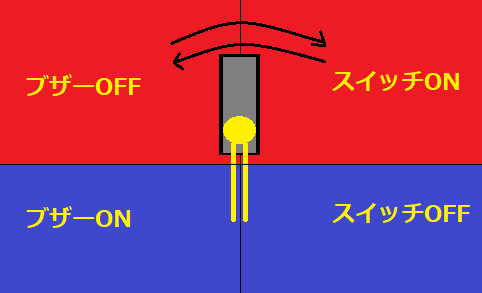
SW1がオンのとき、つまり図4に示すように傾斜スイッチがどちらかの方向に90度以上傾いていないと、4番ピン(RESET)に0[V]がかかり、LOWとなる。その結果、NE555タイマーはリセット状態となる。 この状態では、2番ピン(TRIG)がLOWであっても、 3番ピン(OUT)に出力されず、電子ブザーは動作しない。
SW1がオフのとき、つまり傾斜スイッチがどちらかの方向に90度以上傾くと、4番ピン(RESET)がHIGHになり、リセット状態が解除される。 また、2番ピン(TRIG)は常にLOWのため、3番ピン(OUT)に出力が発生し、 電子ブザーが動作する。SW1がオフのままである限り、ブザーは鳴り続ける。
考察:
本センサーは精密なものではないので、正確な傾きの測定はできないが、ラジコンの小型ボートのような装置には使えるかもしれない。 図5、6に示すようなラジコンボートは比較的小型でありながら高速で走行できる。しかし、カーブ時に90度以上傾いて転覆することがある。 本センサーをボート内部に設置することで、屋内プールでの試走時に傾斜が90度以上になったことをリアルタイムで検知でき、より安定したボートの開発に役立つと考えられる。 また、ボートを水の濁った池や湖で使用する場合、転覆後に水底のどこに衝突したのかを特定するのは難しい。そこで、本センサーを用いることで、ボートが転覆した際に溺れている最中で鳴り続け、 視界が悪い水中でもボートの位置を把握しやすくなり、ボートの回収が容易になる。


本センサーをボートに搭載する前に、回路の調整が必要であると考えられる。センサーの重量は、ボートの動きに影響を与えないように考慮しなければならない。これは、センサーをSMB部品でPCBボード上に作ることで可能であろう。 また、ボートが動作中に上下運動もするため、傾斜スイッチ内部の玉が跳ね続け、ブザーが断続的にオン・オフを繰り返す可能性がある。その対策として、タイマー(コンデンサ・抵抗やもう一つのNE555チップで構成されたもの)を追加し、 例えばスイッチが100[ms]以上オフの状態が続いた場合にのみブザーを動作させるようにすることで、不安定な動作を防ぐことができる。
参考文献:
[1]https://ana-dig.com/timer555/#toc3